3.21. Vision Quest¶
[1]:
import jyro.simulator as jy
import conx as cx
from IPython.display import display
import random
import numpy as np
Using TensorFlow backend.
ConX, version 3.7.4
[2]:
def make_world(physics):
physics.addBox(0, 0, 5, 5, fill="gray", wallcolor="gray")
physics.addBox(0, 0, 0.5, 0.5, fill="blue", wallcolor="blue")
physics.addBox(0, 5, 0.5, 4.5 , fill="red", wallcolor="red")
physics.addBox(4.5, 4.5, 5, 5, fill="green", wallcolor="green")
physics.addBox(4.5, 0, 5, 0.5, fill="purple", wallcolor="purple")
physics.addBox(2, 1.75, 2.5, 3.25, fill="orange", wallcolor="orange")
physics.addLight(3, 2.5, 1)
def make_robot():
robot = jy.Pioneer("Pioneer", 3, 1, 0)
robot.addDevice(jy.Camera())
robot.addDevice(jy.Pioneer16Sonars())
robot.addDevice(jy.PioneerFrontLightSensors(3))
return robot
robot = make_robot()
robot.mystep = 0
robot.priority = random.choice(["left", "right"])
sim = jy.Simulator(robot, make_world)
def get_quadrant(x, y, max_x=5, max_y=5):
if x <= max_x/2 and y <= max_y/2:
return 1
elif x <= max_x/2 and y >= max_y/2:
return 2
elif x >= max_x/2 and y >= max_y/2:
return 3
else:
return 4
SAMPLES = 500
def controller(robot):
if robot.mystep % 200 == 0:
robot.priority = "left" if robot.priority == "right" else "right"
image = robot["camera"].getData()
x, y, h = robot.getPose()
quad = get_quadrant(x, y)
ls = list(robot.targets)
counts = [ls.count(n) for n in [1,2,3,4]]
if quad > len(counts) or counts[quad-1] < SAMPLES:
robot.images.append(image)
robot.targets.append(quad)
sonar = robot["sonar"].getData()
left = min(sonar[0:4])
right = min(sonar[4:8])
clearance = 0.5
noise = random.gauss(0, 0.2)
if robot.priority == "left":
if left < clearance or right < clearance:
robot.move(0, -0.5+noise)
else:
robot.move(0.5+noise, 0)
else:
if left < clearance or right < clearance:
robot.move(0, 0.5+noise)
else:
robot.move(0.5+noise, 0)
robot.mystep += 1
robot.brain = controller
robot.images = []
robot.targets = []
[3]:
i = 0
while True:
if i % 100 == 0:
print(i, end=" ")
#display(robot["camera"].getImage())
sim.step(run_brain=True)
ls = list(robot.targets)
x = [ls.count(n) for n in [1,2,3,4]]
if min(x) == SAMPLES:
break
i += 1
## Now trim all of them to same length
with open("vision_images.npy", "wb") as fp:
np.save(fp, robot.images)
with open("vision_targets.npy", "wb") as fp:
np.save(fp, robot.targets)
print("done collecting data")
0 100 200 300 400 500 600 700 800 900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 2100 2200 2300 2400 2500 2600 2700 2800 2900 3000 3100 done collecting data
[5]:
!ls -l *.npy
-rw-r--r-- 1 dblank dblank 57600128 Sep 11 10:54 vision_images.npy
-rw-r--r-- 1 dblank dblank 16128 Sep 11 10:54 vision_targets.npy
[6]:
vision_images = np.load("vision_images.npy")
print(vision_images.shape)
vision_targets = np.load("vision_targets.npy")
print(vision_targets.shape)
(2000, 40, 60, 3)
(2000,)
[7]:
ls = list(vision_targets)
x = [ls.count(n) for n in [1,2,3,4]]
print(x)
print(sum(x))
[500, 500, 500, 500]
2000
[11]:
def vision_network(actf):
net = cx.Network("Vision Controller")
net.add(cx.ImageLayer("img_input", (40,60), 3),
cx.Conv2DLayer("conv1", 10, (5, 5),
activation=actf),
cx.Conv2DLayer("conv2", 10, (5, 5),
activation=actf),
cx.MaxPool2DLayer("pool1",
pool_size=(2,2)),
cx.FlattenLayer("flatten"),
cx.Layer("hidden", 20,
activation=actf),
cx.Layer("output", 4,
activation="softmax"))
net.connect()
net.compile(loss="categorical_crossentropy",
optimizer="adam")
return net
net = vision_network("relu")
net["conv1"].feature = 7
net.picture(vision_images[0])
[11]:
[14]:
net.picture(vision_images[19], rotate=True)
[14]:
[15]:
net.propagate_to_features("conv1", vision_images[10], scale=3)
[15]:
 |  |  |  |  |
 |  |  |  |  |
[16]:
net.propagate_to_features("conv1", vision_images[20], scale=3)
[16]:
 |  |  |  |  |
 |  |  |  |  |
[17]:
img = cx.array_to_image(vision_images[0], scale=3.0)
img
[17]:
[18]:
net.picture(vision_images[10], rotate=True)
[18]:
[19]:
net.picture(vision_images[100], rotate=True)
[19]:
[20]:
net.propagate_to_features("conv2", vision_images[100], scale=3.0)
[20]:
 |  |  | |  |
 | |  |  |  |
[21]:
ds = net.dataset
[22]:
ds.clear()
[23]:
%%time
dataset = []
for i in range(len(vision_images)):
dataset.append([vision_images[i], cx.onehot(vision_targets[i] - 1, 4)])
ds.load(dataset)
CPU times: user 182 ms, sys: 28.1 ms, total: 210 ms
Wall time: 200 ms
[24]:
ds.split(.1)
[25]:
ds.summary()
_________________________________________________________________
Vision Controller Dataset:
Patterns Shape Range
=================================================================
inputs (40, 60, 3) (0.0, 1.0)
targets (4,) (0.0, 1.0)
=================================================================
Total patterns: 2000
Training patterns: 1800
Testing patterns: 200
_________________________________________________________________
[26]:
#net.delete()
#net.train(5, report_rate=1, plot=True)
#net.save()
[27]:
if net.saved():
net.load()
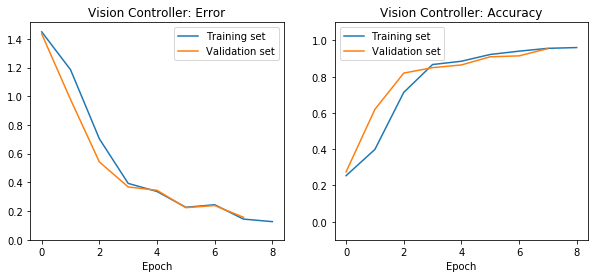
net.plot_results()
else:
net.train(5, report_rate=1, save=True)
[28]:
net.dashboard()
[29]:
robot["camera"].getImage().resize((240, 160))
[29]:

[30]:
image = net.propagate_to_image("conv2", vision_images[0], scale=2.0)
image
[30]:

[31]:
net.propagate_to_features("conv2", vision_images[0], scale=3.0)
[31]:
 |  |  | |  |
 |  |  |  |  |
[32]:
net.propagate(vision_images[10])
[32]:
[9.008902998597357e-12,
0.002418647985905409,
0.006460414733737707,
0.9911209940910339]
[33]:
net.propagate(cx.array_to_image(robot["camera"].getData()))
[33]:
[3.493300255286158e-06,
0.9392081499099731,
0.06070834398269653,
8.00939742475748e-05]
[34]:
from conx.widgets import CameraWidget
[35]:
cam = CameraWidget()
cam
[30]:
image = cam.get_image().resize((60, 40))
[31]:
net.propagate(image)
[31]:
[0.0010676287347450852,
0.8014371395111084,
0.11032900214195251,
0.08716624975204468]
[32]:
net.propagate(robot["camera"].getData())
[32]:
[0.024557704105973244,
0.4533555805683136,
0.41964301466941833,
0.10244368016719818]
[33]:
net.evaluate()
========================================================
Testing validation dataset with tolerance 0.1...
Total count: 1800
correct: 1335
incorrect: 465
Total percentage correct: 0.7416666666666667
[37]:
def network_brain(robot):
if robot.mystep % 200 == 0:
robot.priority = "left" if robot.priority == "right" else "right"
inputs = robot["camera"].getData()
outputs = net.propagate(inputs)
print(net.pf(outputs))
sonar = robot["sonar"].getData()
left = min(sonar[0:4])
right = min(sonar[4:8])
clearance = 0.5
noise = random.gauss(0, 0.2)
if robot.priority == "left":
if left < clearance or right < clearance:
robot.move(0, -0.5+noise)
else:
robot.move(0.5+noise, 0)
else:
if left < clearance or right < clearance:
robot.move(0, 0.5+noise)
else:
robot.move(0.5+noise, 0)
robot.mystep += 1
[38]:
net.visualize = False
robot = make_robot()
robot.brain = network_brain
robot.mystep = 0
robot.priority = random.choice(["left", "right"])
vsim = jy.VSimulator(robot, make_world)
[ ]: